Welcome to the first log about SAM the drawing machine. Our intention here is simple. We want to both document and share the creative process as the project develops. We will probably end up sharing a lot more than just that though. Simply because writing about the technicalities of how to get a machine to draw is bloody boring.
Where to start then with all this? A straightforward question and yet a deceptively intricate one to answer. In our context, it began one morning sitting out on the terrace with a coffee and cigs pondering the meaning of what a plotter was. More importantly perhaps, what a plotter could be because plotters in the computer age are already fifty years old. If we were to extend that idea to include the machine as an automaton, then history takes us back to the Greeks of geeks. This is where the banter began.
We have a lot of shared ideas about how we see SAM but we also have, well, just a fucking lot of ideas. Two is company, three is a crowd and from the outset SAM began to impose its presence. Jeez, the thing wasn’t even built and already our conversations were animated by its very being. SAM was gonna be the Semantic Automate Machine, drawing Twitter conversations all day long. It was gonna be the Semi-Automatic Member that sat in on boring business meetings and noted down the minutes. It was the Sexual Attractor Machine that relieved your mind of having to worry about signing in to all those surprise dating websites, writing out hand-written love letters to potential candidates. The Sodding Apple Masher, Sandwich Autonomous Maker, the... and the list goes on. As you can see, the beginning of the creative process can get a bit wild, especially if you let the more esoteric side of one’s imagination take the reins. Talk and banter is all very well. It’s a necessary part of oiling the cerebral factory of thoughts. However, it was time to launch our master plan and attack some practical issues. Namely, how to build the bloody thing.
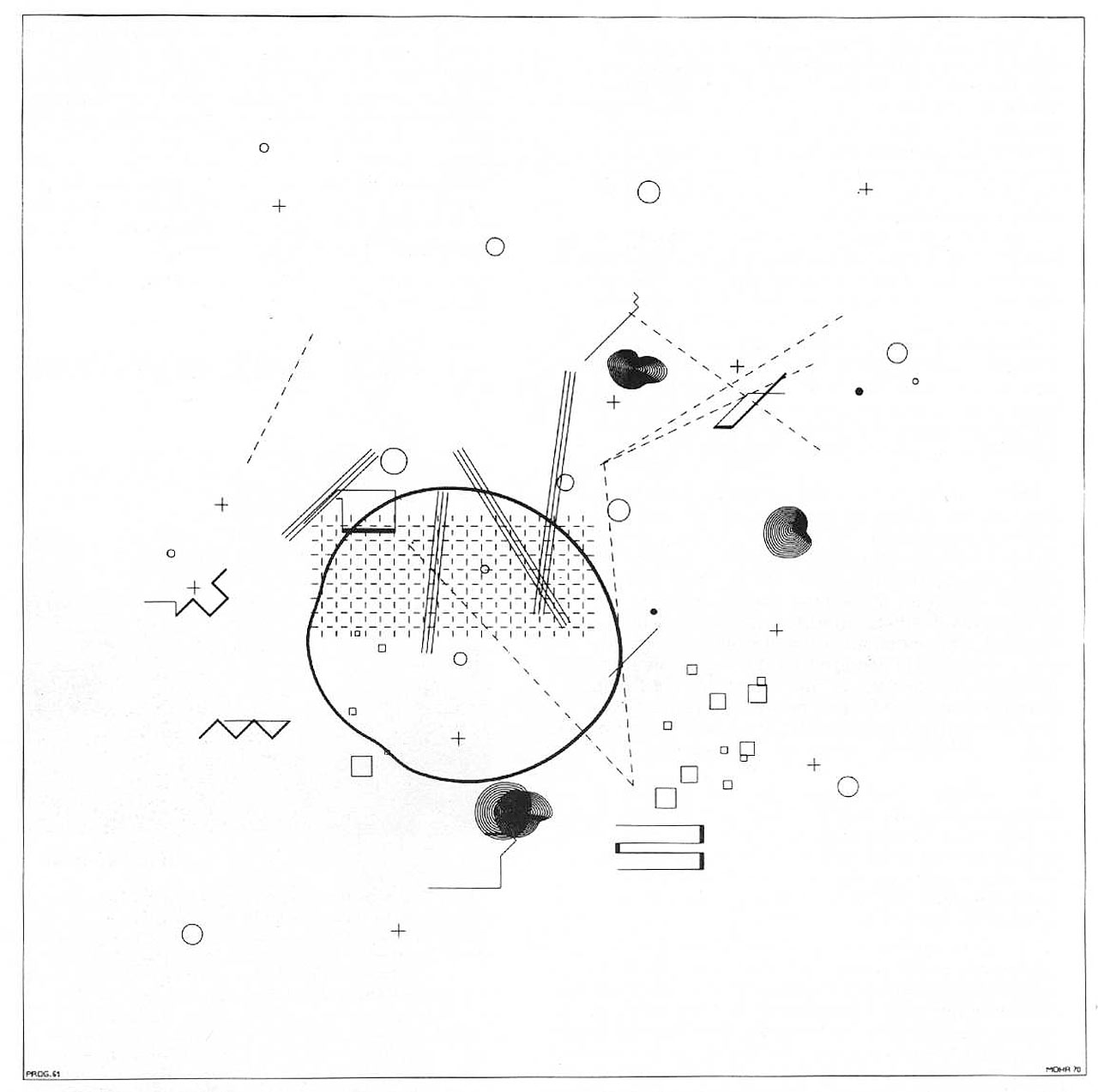
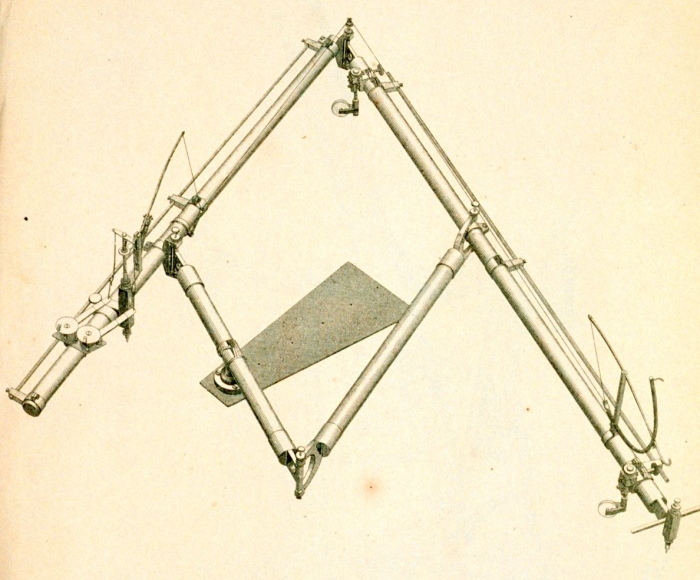
Geometric Hints - Manfred Mohr - 1971
There are three main issues in our project, each of which has its own specific problematics and are dependent on each other. Here’s what we pinned down in our first session.
Inspiring Projects
Hardware 1
SAM needs a brain, body, arm and a hand. For the more technically minded out there, that translates as an Arduino (or two), some motors and the necessary shield, an x, y and z axis, some sleek looking sliding parts along with cogs, bearings and little bits n' bobs that make your head spin out of control. None of which we had to start out with, except for the Arduinos. Our first hurdle was therefore figuring out a design and finding a pencil sharpener in the meantime until we had the bare minimum to put some ideas to the test.1. A List of Tings
Most of the materials and components needed for making SAM can be easily found. Some however are a little more tricky to get hold of. So we'll be publishing a full list somewhere on this site once we have a first prototype.
Software
Arduino & Processing are our protagonists here. One of which we had knowledge of. So logically we were half way there right? No. In fact far from it because the main staple diet of any idea that puts one in the physical world with mechanics and moving parts will invariably mean you need more of Arduino than Processing. At least to begin with. To tickle a motor and set it into motion is no easy task. For us at least it wasn't. Sure, you can plug in a stepper motor to the good ol' Arduino Uno, call the necessary library, declare ya object and hell yes the motor responds. Get Processing chatting along on best buddy terms with the big Ard is also pretty straightforward. However, we encountered a number of annoying problems for which we will share our insight once we have the fucking answers.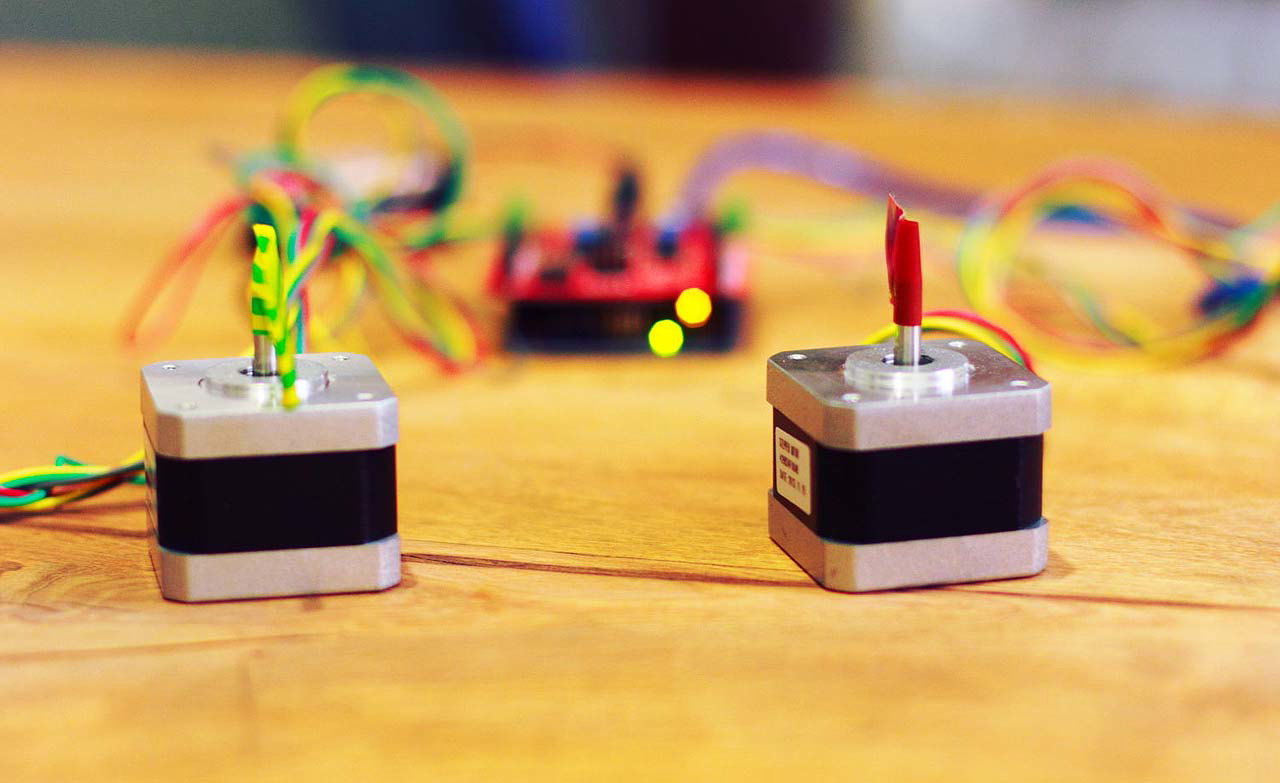
Test Nema Motors - Team SPAM - 2014
Once we had our motors and the necessary shield2 we were itching to do only one thing. Yes, we too wanted to enter the ranks of flag spinning antics. And we did with relative success [ See our first video doc.] This first step for SAM and the team was a proof of concept. Yes, we can move a motor and even control it with other software. Jah behold!
2. Shields
In fact a motor shield does not protect your motor from the damnation of household dust. It’s a piece of hardware that plugs into your Arduino and acts as the main driving force for your motors. So do your homework on what you need. We chose Nema 17 steppers with a Chinese made shield.
Design
Design is the beautiful process of neatly folding your Sunday best. As opposed to art which is all about getting them dirty. The freedom to put ideas to paper and imagine a machine that not only does something, but also has the sex appeal to stir the cogs of emotion is a process we love to embark upon. Sure, we want SAM to look the part. Design issues however need to take into account a lot of technical aspects. Some of these by nature will push us into disciplines for which we have no piece of paper stipulating our competence. Mechanics my dear Watson, mechanics.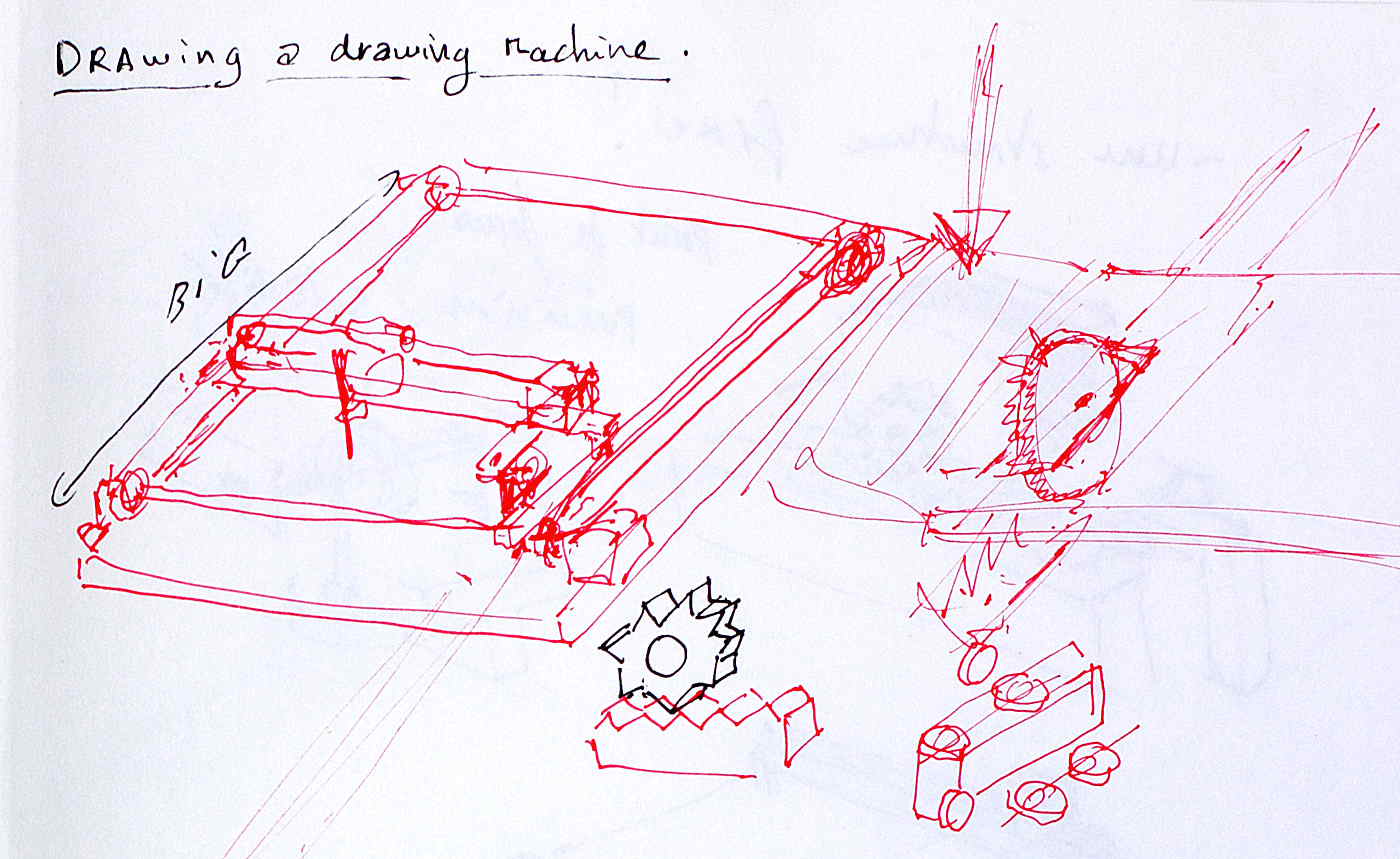
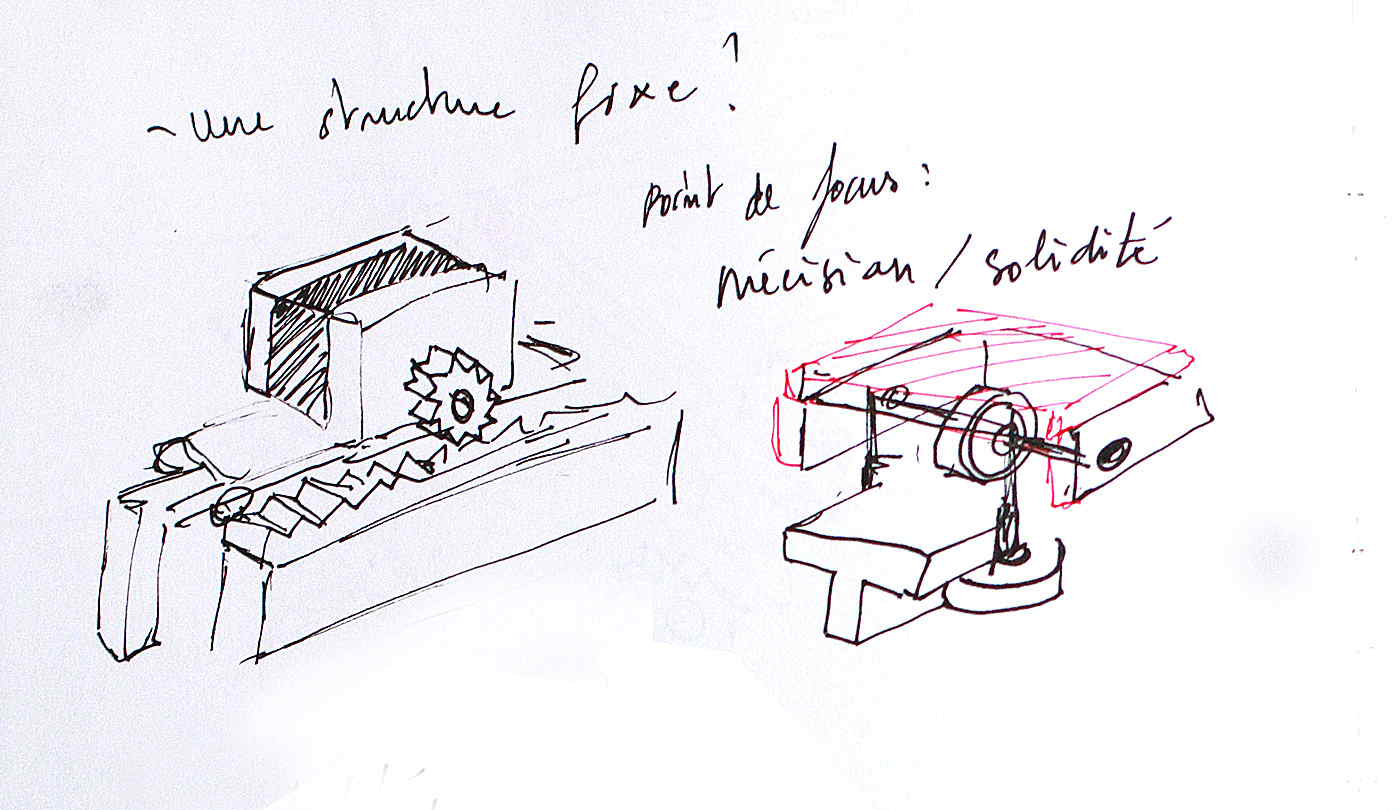
First Rough Design - Team SPAM - 2014
What have we learned ?
Apart from a whole stack of shit, including why people put flags on their motors, we amassed a lot of information. We will elucidate on the finer details in future posts but one issue that should be noted was the ‘Do we rack it or belt it?’ debate. Eh?
Well, for SAM to draw, we need to have a robust mechanical system for moving the arm around the drawing area and eventually a hand that moves up and down. In our original and we hope to be final design, we opted for a rack system for linear movement of the x and y axis. Inspiration came from the fantastic Polar Plotter project. As of writing, the belt option has become our solution for the prototype. More about that laters too.
Linear Motion System Idea - Team SPAM - 2014